Tiny sensor harnesses light to feel touch
About Optica
07 May 2026
Tiny sensor harnesses light to feel touch
Grain-sized device uses a single optical signal to simultaneously detect force and twisting in all directions, which could improve precision in robotics and medical instruments
WASHINGTON — Researchers have developed a sensor about the size of a grain of rice that can measure forces and twisting motions in all directions using light instead of traditional electronics. The new sensor could help robotic tools and medical devices “feel” what they are touching, especially at very small scales.
Caption: Researchers developed a sensor that measures just 1.7 millimeters and can measure forces and torque in all directions using light.
Credit: Jianlong Yang, Shanghai Jiao Tong University in China
“Although modern imaging systems can show structures clearly, they do not provide information about physical interaction, such as force or torque, and existing force sensors are often too bulky or complex to fit into miniature tools,” said research team leader Jianlong Yang from Shanghai Jiao Tong University in China. “By allowing machines to measure contact force, pressure, shear and twisting, our technology could make it possible for robots to detect unsafe contact early and adjust their actions in real time, especially in small and sensitive environments.”
In Optica, Optica Publishing Group’s journal for high-impact research, the researchers describe their new sensor, which measures just 1.7 millimeters and uses a single optical signal to measure forces and torques in all directions at once. Proof-of-concept tests showed that the sensor can detect stiffness variations and locate hidden structures in in models that mimic a tumor embedded in tissue.
“Robotic systems used in minimally invasive surgery operate in extremely tight spaces, such as inside the eye or through narrow surgical pathways,” said Yang. “By making tools and robots safer and more precise, this technology could make delicate medical procedures more controlled and reduce the risk of accidental damage.”
Turning touch into light
The new work grew out of a broader effort to develop optical sensing technologies for minimally invasive surgery and robotic systems. While conventional solutions rely on multiple sensing elements or complex structures, the researchers wanted to develop a simple and inexpensive device that used a single optical signal to measure forces and torques in all directions at once.
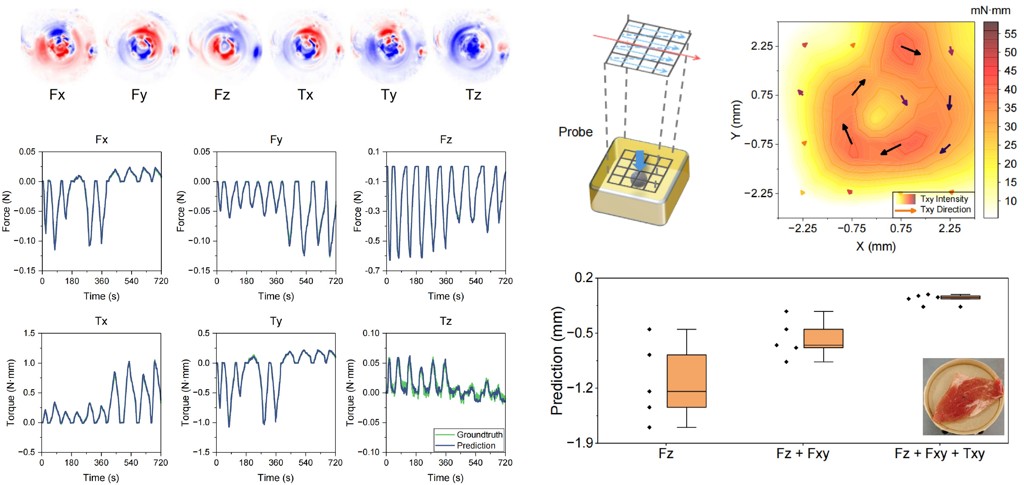
Caption: The upper left images show the optical response patterns associated with different force and torque axes. The lower left shows the six-axis measurements under time-varying loading conditions, together with comparisons against the ground-truth reference sensor. The right side illustrates results from a simulated tumor localization experiment, demonstrating how the sensor can help identify hidden structures through combined normal, shear and torsional interactions.
Credit: Jianlong Yang, Shanghai Jiao Tong University in China
To capture physical interaction using light rather than traditional electrical sensors, they developed a sensor that consists of an optical fiber with a soft elastomer tip that deforms slightly when it contacts an object. Even a tiny deformation changes how light is distributed in the optical cavity inside the tip, forming a light pattern that travels through a coherent fiber bundle to a camera that captures the pattern as an image.
The coherent fiber bundle preserves spatial information in the transmitted light patterns, allowing all the sensing to be performed through a single optical channel without complex wiring or multiple sensing elements. The image is then analyzed by using data-driven methods to recover forces and torques in all directions.
“Our sensor works differently from conventional miniature force sensors, such as fiber Bragg grating (FBG) systems that rely on multiple sensing elements and carefully designed structures to separate different force components,” said Yang. “We are not measuring force piece by piece but are sensing the overall contact state in a single step. We believe this shift could make it easier to build compact tools that can both see and feel.”
Feeling beneath the surface
The researchers evaluated the sensor using a controlled experimental setup where known forces and torques were applied while recording its optical response. They used a precision reference force-torque sensor for baseline measurements and a motorized stage to create a wide range of loading conditions, including combined forces and twisting.
During these experiments, the sensor achieved accurate repeatable measurements with low hysteresis — meaning it produced nearly identical readings during loading and unloading — even under complex loading conditions. Its performance also remained stable under temperature changes and when the probe was bent.
The researchers also performed tumor-palpation tests using gelatin containing a stiff spherical inclusion to mimic a subsurface tumor, showing that sensor was able to detect and locate the inclusion. This type of information could support tactile guidance and mechanical mapping in minimally invasive interventions.
Next, the researchers plan to move from laboratory validation to practical use by improving manufacturing consistency and reducing the need for complex calibration. The sensor also needs to be integrated into tools and robotic systems relevant to envisioned use cases and tested under realistic, long-term operating conditions. Before commercialization, additional development is needed to ensure reliable performance at scale and to package the system into a compact, user-friendly form that can be easily deployed in medical and industrial settings.
Paper: W. Zhang, C. Liu, Z. Li, H. Zhang, X. Shen, Q. Lan, C. Gu, J. Yang, "Deformation-encoded light-field transduction enables 6-DoF optical force sensing in a 1.7 mm footprint," Optica 13, 884-899 (2026)
DOI: 10.1364/OPTICA.582941.
About Optica Publishing Group
Optica Publishing Group is a division of the society, Optica, Advancing Optics and Photonics Worldwide. It publishes the largest collection of peer-reviewed and most-cited content in optics and photonics, including 19 prestigious journals, the society’s flagship member magazine, and papers and videos from over 1200 conferences. With over 520,000 journal articles, conference papers and videos to search, discover and access, its publications portfolio represents the full range of research in the field from around the globe.
About Optica
Optica is an open-access journal dedicated to the rapid dissemination of high-impact peer-reviewed research across the entire spectrum of optics and photonics. Published monthly by Optica Publishing Group, the Journal provides a forum for pioneering research to be swiftly accessed by the international community, whether that research is theoretical or experimental, fundamental or applied. Optica maintains a distinguished editorial board of more than 60 associate editors from around the world and is overseen by Editor-in-Chief Thomas Krauss, University of York, UK. For more information, visit Optica.
Aaron Cohen
301-633-6773
aaroncohenpr@gmail.com
